Appearance
Procesamiento Raster
El procesamiento de mapas raster en GRASS se realiza en la configuración de la región actual (ver g.region), es decir, se utiliza la medida en la región actual y la resolución del raster actual. Si la resolución difiere de la del mapa ráster de entrada, se lleva a cabo un remuestreo ( mediante vecino más cercano ). Si esto no que se desea, el mapa de entrada (s) tiene / tienen que ser remuestreados previamente con algún módulo adecuado.
El remuestreo por vecino más cercano calcula el centro de cada celda de la región, y toma el valor de la celda raster en que el punto se ubica.
Si el punto se ubica exactamente sobre una línea de la cuadrícula, el resultado exacto será determinado por la dirección de cualquier error de redondeo. Una consecuencia de esto es que la disminución de la resolución en un factor que es un entero par siempre se calcula exactamente en el límite entre las celdas, lo que significa que el resultado no será muy correcto.
Remuestreo de datos raster
El comando r.resample realiza un remuestreo de los valores de los datos en una capa raster de entrada (delimitada por la región geográfica actual y enmascarado por la máscara actual), y produce nuevo mapa ráster de salida que contiene los resultados del remuestreo. Los valores de categorías en la nueva capa del mapa ráster de salida será el mismo que los de la original, excepto que la resolución y la extensión de la capa del mapa ráster de salida debe coincidir con los de la configuración de región geográfica actual (ver g.region). r.resample está destinado a la reinterpolación de datos continuos con una resolución diferente en lugar de para la interpolación de datos dispersos (utilice el v.surf para este propósito).
g.region rast=elev_state_500m -p
g.region res=250 -ap
r.resample input=elev_state_500m output=elev_state_250mEstablecimiento de la región actual
El comando g.region se utiliza para definir la región geográfica de trabajo. Todas las operaciones raster se aplican sobre dicha región.
g.region rast=name [n=value] [s=value] [e=value] [w=value]
[t=value] [b=value] [rows=value] [cols=value] [res=value]donde
- region=name: Establece el nombre de la región actual
- rast=name: Establece que la región coincida con un mapa raster
- vect=name: Establece que la región coincida con una mapa vectorial
- n=value: Valor de la esquina mas al norte
- s=value: Valor de la esquina mas al sur
- e=value: Valor de la esquina mas al este
- w=value: Valor de la esquina mas al oeste
- rows=value: Cantidad de filas en la región
- cols=value: Cantidad de columnas en la región
- res=value: Resolución de la rejilla
Reclasificación de datos raster
El comando r.reclass crea una nueva capa de mapa cuyos valores de categoría se basan en una reclasificación de las categorías en una capa de mapa raster existente.
Las reglas de reclasificación se leen desde la entrada estándar (es decir, desde el teclado, desde un archivo, o por entubamiento a través de otro programa).
r.reclass input=input_raster output=output_raster rules=rules_filer.reclass sólo funciona con un mapa de entrada de enteros, si el mapa de entrada es de datos de punto flotante, hay que multiplicar los datos de entrada por un factor de escala para convertir en enteros los datos de entrada, de lo contrario r.reclass redondeará el valor hasta el siguiente entero.
Un mapa reclasificado no es un mapa ráster de verdad. Más bien, es una tabla de valores de reclasificación que hacen referencia a la capa del mapa raster de entrada. Por lo tanto, los usuarios que deseen conservar las capas de mapas reclasificados también debe guardar las capas raster originales de las que fueron generados. Sin embargo, el comando r.mapcalc se puede utilizar para convertir un mapa de reclasificación en una capa raster regular:
r.mapcalc query="raster_map = reclass_map"Reglas de reclasificación
Cada línea de entrada debe tener el siguiente formato:
input_categories = output_category [etiqueta]
donde en cada línea de entrada se especifican los valores de la categoría en la capa de entrada ráster que se reclasifica a la categoría del nuevo valor output_category. La especificación de una etiqueta que va asociada con la categoría de la capa de salida es opcional. Si se especifica, se registra como la etiqueta de la categoría para el valor de la nueva categoría. El signo igual = es requerido. El input_category puede consistir en valores de las categorías individuales o una serie de tales valores en el formato de "x thru y". La palabra "thru" debe estar presente.
Para incluir todos los valores (restantes)el asterisco * se puede utilizar. Esta regla se debe establecer como regla últimaa. Ninguna otra regla será aceptada después de establecer esta regla. La regla especial "* = *" especifica que todas las categorías no explícitamente establecidos por una de las reglas anteriores se debe pasar sin alteraciones en lugar de estar asignar valores NULL.
Las categorías sin especificar se les establecerá un valor de sa a "NULL".
Una línea que contiene sólo la palabra end termina la entrada.
Ejemplos
Una reclasificación que utiliza el asterisco para todos los otros valores:
1 3 5 = 1 poor quality
2 4 6 = 2 good quality
* = NULLUna reclasificación que utiliza el palabra thru para realizar la reclasificación:
1 thru 10 = 1
11 thru 20 = 2
21 thru 30 = 3
30 thru 40 = NULLEjercicios
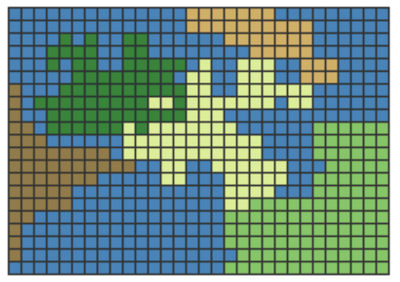
- Usando un editor de bitmaps (paint o similar) cree una archivo con colores de celdas similares a la imagen que se muestra más abajo. Importe dicho archivo en Grass como un mapa raster y posteriormente reclasifique cada color como: azul -> 1 water, beige -> 2 Prince Edward Island, café -> 3 New Brunswick, verde claro -> 4 Halifax, verde oscuro -> 5 Cumberland, amarillo -> 6 Colchester.
- Genere una imagen PNG a partir del mapa reclasificado.
- Genere el mapa reclasificado en formato AAIGrid junto con los atributos (opción -t)