Appearance
Sistemas de Referencia Lineal
Muchas organizaciones recolectan datos sobre elementos lineales, tales como autopistas, calles de la ciudad, líneas de ferrocarril, ríos, y tuberías de redes de acueductos o alcantarillados.
En muchos SIG, estos elementos son modelados en dos dimensiones, usando coordenadas x,y. Aún cuando estos sistemas trabajan bien para mantener elementos con características estáticas, existen muchos casos en que los elementos lineales tienen características que son más dinámicas por naturaleza. Para manejar esto, se han desarrollo los sistemas de referencia lineal de una dimensión que permiten modelar este tipo de datos.
Un sistema de referencia lineal identifica localizaciones en una red de elementos mediante la medición de distancias desde un punto de referencia particular a lo largo de una ruta específica en la red.
Referencia lineal
La localización de un elemento espacial a través de otro elemento lineal puede ser realizado usando un sistema de referencia planar (dos dimensiones).
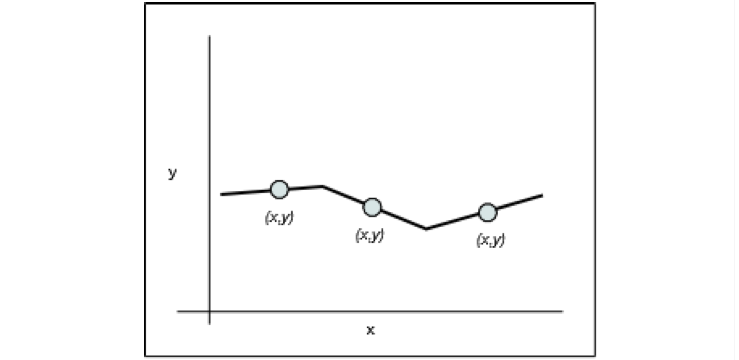
Esto trabaja bien en algunas aplicaciones. En otras, sin embargo, las localizaciones a lo largo de elementos líneas son referenciados en términos de su distancia desde un punto conocido. Por ejemplo, tiene mucho más sentido registrar la ubicación de un accidente como ocurrido en "kilómetro 12 del inicio de la autopista" en lugar de "-85.455633,10.56665".
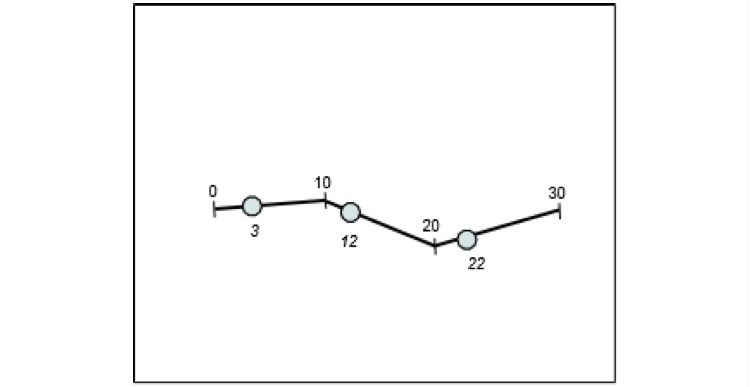
Para determinar una localización a lo largo de un elemento lineal, un sistema de medida es requerido. Cuando un sistema de medida es almacenado con un elemento lineal, cualquier localización a lo largo de dicho elemento lineal puede ser expresado en términos de valores de medida.
Datos segmentados
El modelo vectorial de almacenamiento de datos dicta que los elementos lineales se deben separar en cualquier lugar que cambien los valores de sus atributos. Ciertos elementos lineales, sin embargo, tienen atributos que cambian frecuentemente.
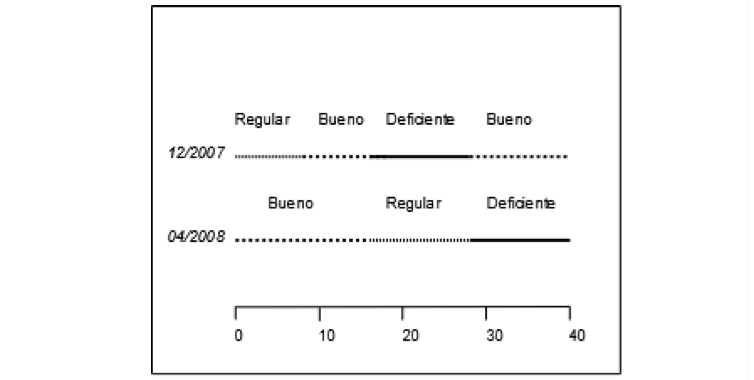
La condición del pavimento de una carretera, por ejemplo, cambia conforme el pavimento se deteriora y es subsecuentemente reparada. Para reflejar en forma precisa los cambios en la condición del pavimento, se debería separar algunos elementos lineales y unir otros.
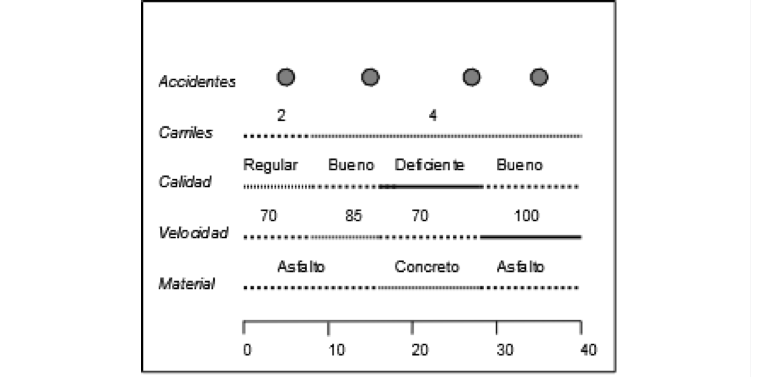
La segmentación de elementos lineales llega a ser más problemática cuando se necesita almacenar otros atributos, tal como volumen de tráfico, información de carriles, materiales de la superficie, límites de velocidad, y ubicación de accidentes. Cada vez que estos atributos cambian, la carretera necesitaría dividirse. Con todas las segmentaciones requeridas, es evidente que los elementos lineales serán tan divididos que los datos serán difícil, sino imposible, de mantener.
Un SIG usa una tabla de eventos de rutas para almacenar atributos referenciados linealmente. El campo del evento está compuesto de un identificador de ruta, un valor de medida indicando una localización, y uno o más atributos describiendo la ubicación.
Ubicaciones en ruta
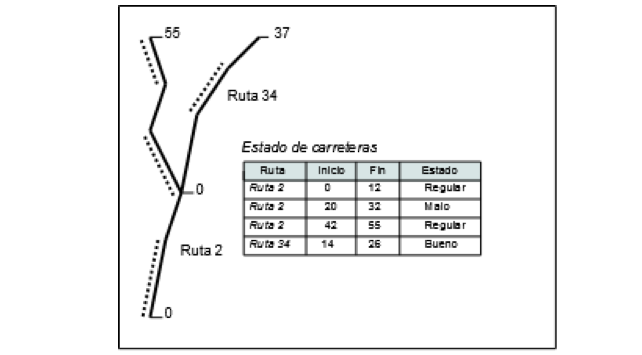
Una ubicación en ruta describe una localización discreta a lo largo de un ruta (punto) o una porción de una ruta (línea). Una ubicación puntual en ruta usa un único valor de medida para describir una ubicación discreta a lo largo de la ruta. Un ejemplo de una ubicación puntual en ruta es "kilómetro 3.5 en la ruta 32". Una ubicación lineal en ruta usa dos valores de medida (desde y hasta) para describir una porción de la ruta, un ejemplo de esto sería "del kilómetro 20 al kilómetro 25 de la ruta 2".
Cuando las ubicaciones en ruta, y sus atributos asociados, son almacenados en una tabla, ésta es conocida como la tabla de eventos en ruta o simplemente tabla de eventos.
Tabla de eventos en ruta
Debido a que existen dos tipos de ubicaciones en ruta, existen dos tipos de tablas de eventos: puntuales y lineales.
Una tabla de eventos en ruta, a lo menos, consiste de dos campos: un identificador de ruta y una medida de localización. El campo de identificación de ruta es un valor numérico o caracter usado para identificar la ruta a que el evento pertenece. Una medida de localización es uno o dos campos que describen las posiciones a lo largo de ruta en que ocurre el evento.
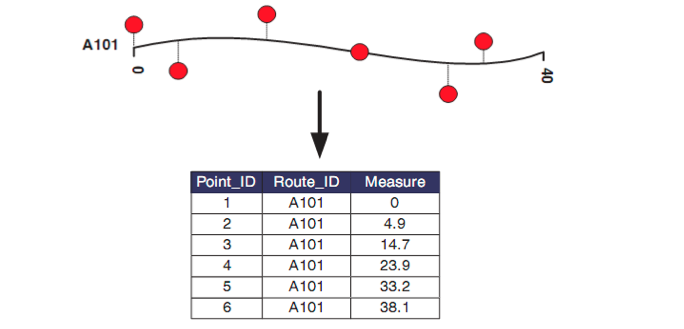
Eventos puntuales
Los eventos puntuales ocurren en una localización puntual precisa a través de una ruta. Ejemplos de eventos puntuales son:
- Las ubicaciones de accidentes a través de autopistas
- Señales a lo largo de líneas de ferrocarril
- Paradas de autobuses a través de rutas de autobuses
- Estaciones de bombeo a lo largo de tuberías
- Compuertas a lo largo del cauce de un río.

Los eventos puntuales usan un valor de medida sencillo para describir su ubicación, y son localizados a lo largo de una ruta usando esta información de ubicación.
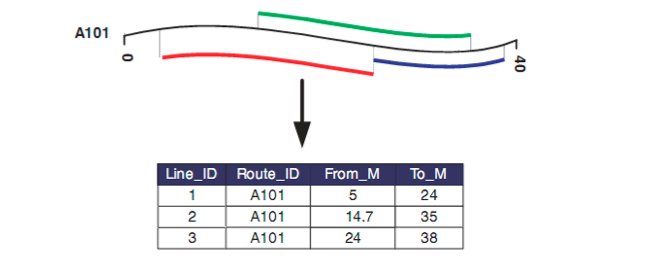
Eventos lineales
Los eventos lineales describen porciones de rutas. Ejemplos de eventos lineales son:
- La calidad del pavimento en diferentes secciones de una autopista
- La tarifa a través de una ruta de autobuses
- El ancho de las tuberías en una red de alcantarillado
- Volúmenes de tránsito en las autopistas de una ciudad
- Los eventos lineales tienen dos valores de medida para describir su localización.
Creación de rutas
Es posible crear rutas mediante la unión de elementos lineales que comparten un identificador común. Existen dos escenarios de cómo las medidas en la ruta pueden ser establecidas:
- Valores de medidas para los elementos de entrada desconocidos
- Valores de medidas para los elementos de entrada conocidos
Valores de medida desconocidos
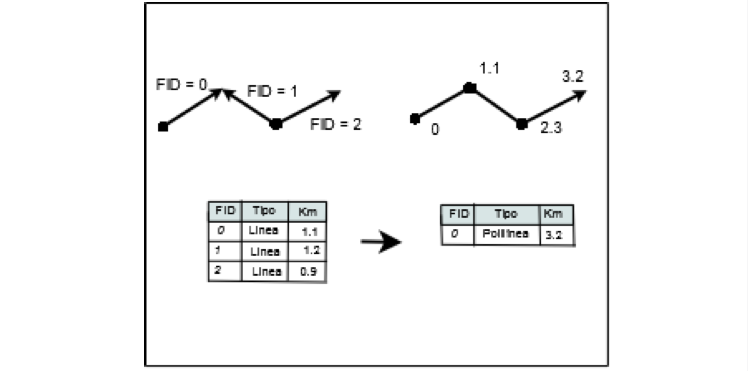
Cuando los valores de medida son desconocidos, ellos pueden ser generados ya sea mediante la acumulación de los largos digitalizados o mediante la acumulación del valor de un atributo numérico del elemento ingresado.
Algunos sistemas soportan rutas con múltiples partes disjuntas. Una ruta que representa una carretera, por ejemplo, puede tener el mismo nombre en ambos lados de un río. Para situaciones como estas, es conveniente ignorar la separación espacial entre las partes cuando se crean las rutas. Si se selecciona ignorar estas separaciones, las medidas de la ruta serán continuas cuando una ruta disjunta sea creada. Si se desea incorporar las separaciones espaciales, la distancia de la separación consiste de la distancia de una línea recta imaginaria entre los puntos finales de ambas partes.
Valores de medida conocidos
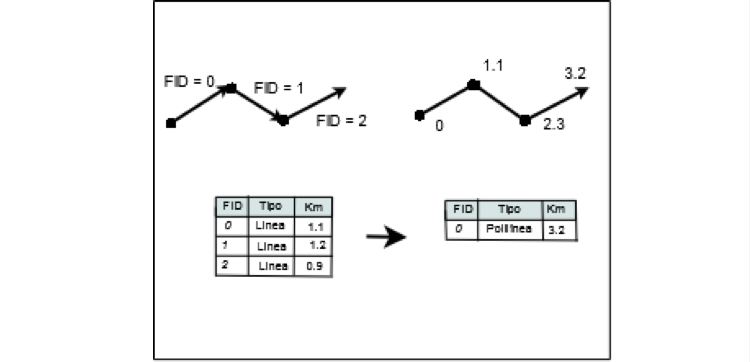
Cuando la información de medidas ya existe como atributos de los elementos lineales de entrada, es posible crear rutas que hereden esta información de medidas. Por ejemplo, dos campos pueden existir que almacenen la información de "desde" y "hasta". Cuando se usa este método, es importante orientar cada elemento de entrada en la dirección de incremento de la medición para prevenir rutas que tienen medidas que no siempre se incrementan.
Calibración de rutas
Cuando las medidas en la ruta son poco precisas, los eventos no serán localizados propiamente. Una ruta que representa una autopista, por ejemplo, puede ser de 10.5 kilómetros de largo. Una curva en la autopista puede tener un valor de medida en el kilómetro 6. Cuando en la realidad, sin embargo, la curva en la autopista ocurre en el kilómetro 6.5. Los eventos en esta ruta, especialmente cerca de la curva, serán localizados incorrectamente.
Es posible ajustar las medidas de la ruta para corresponder con ubicaciones con medidas conocidas usando un procedimiento llamado calibración. La calibración ajusta las medidas de la ruta mediante la lectura información almacenada como un atributo de una capa de puntos. Cada punto que aparece en una ruta particular. Muchos puntos pueden ser usados para calibrar la misma ruta.
Durante el proceso de calibración, un nuevo vértice es creado donde los puntos de calibración intersectan la ruta. El valor de medida en estos nuevos vértices corresponde a los valores de medida almacenados como un atributo del punto. Los valores de medida en otros vértices preexistentes de la ruta pueden ser interpolados y/o extrapolados.
Agregar eventos
Se pueden agregar datos de eventos existentes. Esta operación está diseñada para ayudar a mantener la integridad en grandes tablas de eventos.
La operación combina registros de eventos en tablas en donde hay eventos en la misma ruta y ellos tiene el mismo valor para campos específicos. El resultado generalmente es escrito en una nueva tabla.
Al agregar eventos existen dos opciones. La primera opción es cuando se desea combinar solo eventos en situaciones donde el final de un evento coincide con el inicio del siguiente evento (concatenar). La segunda opción es cuando se desea combinar solo eventos que se traslapan (disolver). Siendo así, la opción de "concatenar" solo estaría disponible para eventos lineales, y la opción de "disolver" estaría disponible para eventos puntuales y lineales.
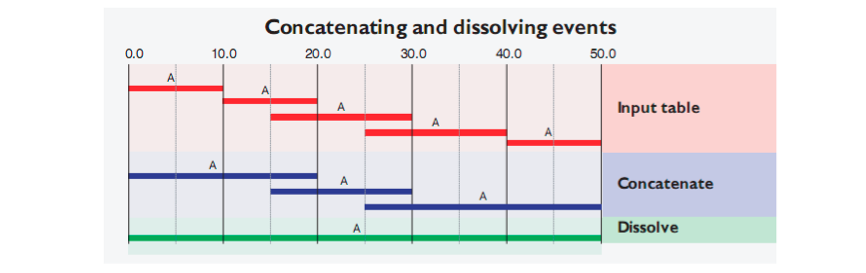
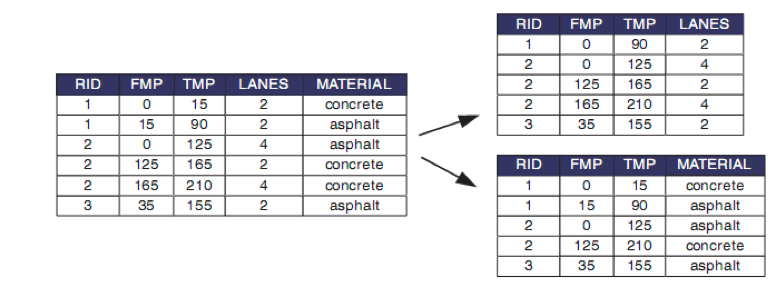
Se puede usar concatenar y disolver para remover información redundante desde la tabla de eventos. Por ejemplo, si un evento lineal en la tabla de pavimentos tiene un atributo "concreto" desde 0 hasta 100, y el siguiente evento tiene un atributo "concreto" desde 100 hasta 125, los dos eventos pueden ser unidos en un único evento desde 0 hasta 125.

Otro uso de concatenar y disolver es separar tablas de eventos que tienen más de un atributo descriptivo, en tablas separadas. Por ejemplo, si la tabla de eventos de pavimento tiene campos "CARRILES" y "MATERIAL", la tabla de eventos puede ser subdividida en dos tablas: una con el atributo "CARRILES", y la otra con el atributo "MATERIAL".
Referencia inversa
Es posible utilizar un Sistema de Referencia Lineal para realizar la referenciación inversa. Esto significa que en lugar de brindar como entrada un evento (especificado mediante una ruta y una distancia) y obtener las coordenadas de un punto, se puede brindar como entrada las coordenadas del punto y se obtiene el evento, es decir, la ruta y distancia a que se encuentra dicho punto.
Generalmente, es necesario especificar un distancia (radio de búsqueda) a la que puede estar ubicada la ruta. Cualquier punto que se encuentre a mayor distancia de todas las rutas posibles, no será considerado en la búsqueda.
La referenciación inversa también puede ser aplicado a eventos lineales. En este caso se pueden brindar las coordenadas de los puntos iniciales y finales del evento, o bien, se podría utilizar la geometría de una polilínea como elemento de entrada. La operación calcula el espacio de intersección entre la línea (o polilínea) y la ruta utilizando también un radio de búsqueda (tolerancia).
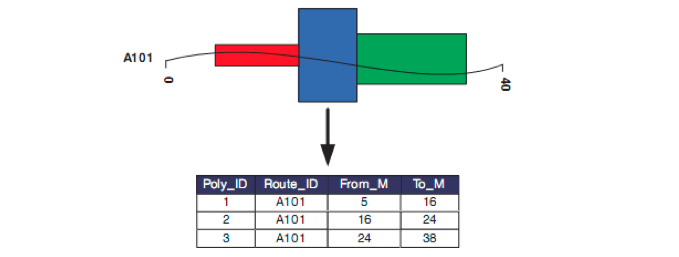
Inclusive la referenciación inversa puede ser aplicada a elementos poligonales. Aquí lo que hace es determinar los puntos de intersección geométrica del polígono y la ruta. Una vez que los datos del polígono han sido localizados a lo largo de la ruta, la tabla de eventos resultante puede ser usada, por ejemplo, para calcular el largo de la ruta que se viaja a través de cada polígono.
Ejercicios
10.1. Dada la siguiente tabla de eventos lineales, muestre las tablas resultantes al realizar respectivas separaciones por: material y vías. Ejecute la debida concatenación de eventos.
| Ruta | Ini | Fin | Material | Vías |
|---|---|---|---|---|
| 1 | 15 | 90 | Asfalto | 2 |
| 2 | 0 | 125 | Asfalto | 4 |
| 3 | 35 | 155 | Asfalto | 2 |
| 1 | 0 | 15 | Concreto | 2 |
| 3 | 155 | 175 | Concreto | 2 |
| 2 | 165 | 210 | Concreto | 4 |
| 3 | 175 | 300 | Asfalto | 4 |
| 2 | 125 | 165 | Concreto | 2 |
| 1 | 90 | 115 | Concreto | 2 |
10.2. Tomando en cuenta la siguiente información para el mapa del metro de Lisboa que se muestra más abajo:
| Linea | Inicio | Fin | Largo (km) |
|---|---|---|---|
| Verde | Telheiras | Cais do Sodre | 45 |
| Vermelho | S.Sevastiao | Aeroporto | 60 |
| Azul | Colegio Militar | Santa Apolonia | 55 |
| Amarello | Lumiar | Rato | 45 |
Aproxime el kilómetro y la ruta en donde se ubican las siguientes paradas: Roma, Terreiro do Paco, Alvalade, Chelas, Parque, Cidade Universitária y Marqués de Pombal.
